SEAS工程师3D打印第一个自主的完全软的机器人
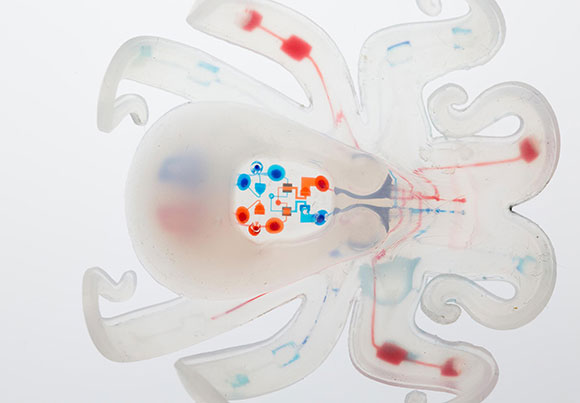
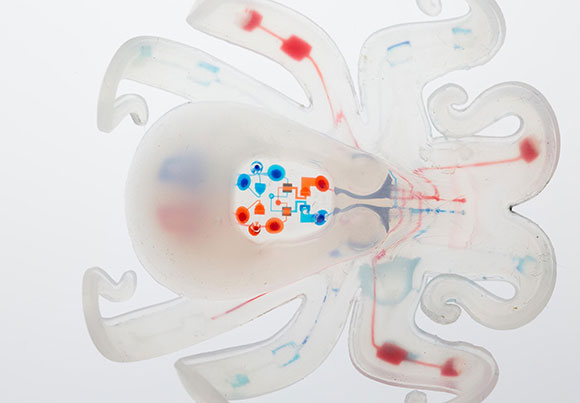
哈佛工程师使用3D打印机演示了第一台自主的,不受束缚的,完全软的机器人。绰号为“ octobot”的小型机器人可以为新一代此类机器铺平道路。
软机器人技术可以帮助改变人类与机器交互的方式。但是研究人员一直在努力制造完全兼容的机器人。电力和控制系统(例如电池和电路板)是刚性的,直到现在,坚固的机器人还是被束缚在了外部系统上,或者是用坚固的组件来操纵的。
哈佛大学约翰·A·保尔森工程与应用科学学院(SEAS)的查尔斯河工程与应用科学教授Robert Wood和汉斯佐格·怀斯生物启发工程教授詹妮弗·刘易斯(Jennifer A. Lewis)领导了这项研究。Lewis和Wood也是哈佛大学Wyss生物启发工程研究所的核心教员。
伍德说:“软机器人领域的一个长期愿景是创造一种完全软的机器人,但一直以来的努力一直是用类似的软系统替换诸如电池和电子控件之类的刚性组件,然后将它们组合在一起。”“这项研究表明,我们可以轻松制造出简单,完全软的机器人的关键组件,这为更复杂的设计奠定了基础。”
这项研究在《自然》杂志上有描述。
“通过我们的混合装配方法,我们能够快速地3D打印软机器人体内所需的每个功能组件,包括燃料存储,动力和致动,”刘易斯说。“ octobot是一个简单的实施例,旨在演示我们用于嵌入自主功能的集成设计和增材制造策略。”
章鱼一直是软机器人领域的灵感之源。这些好奇的生物可以在没有内部骨骼的情况下完成令人难以置信的力量和灵巧壮举。
哈佛大学的octobot是基于气动的,因此由压力气体驱动。机器人内部的反应将少量液体燃料(过氧化氢)转化为大量气体,这些气体流入octobot的手臂并像气球一样膨胀。
伍德实验室的博士后研究员,论文的第一作者,作者迈克尔·韦纳(Michael Wehner)表示:“软机器人的燃料来源始终依赖于某种类型的刚性部件。”“过氧化氢的妙处在于,化学物质与催化剂(在本例中为铂)之间的简单反应,使我们能够替代刚性电源。”
为了控制反应,研究小组使用了微流体逻辑电路,该电路基于共同作者和化学家George Whitesides,Woodford L.和Ann A. Flowers University教授以及Wyss的核心教员的开创性工作。该电路是简单电子振荡器的软模拟,它控制过氧化氢何时分解为octobot中的气体。
整个系统易于制造。通过结合三种制造方法(软光刻,成型和3D打印),我们可以快速制造这些器件。刘易斯实验室的研究生,该论文的第一作者,作者赖安·特鲁比(Ryan Truby)说。
组装过程的简单性为更高复杂性的设计铺平了道路。接下来,哈佛团队希望设计一种可以爬行,游泳并与其环境互动的octobot。
“这项研究是概念的证明,”特鲁比说。“我们希望我们创建自主软机器人的方法能够激发专注于先进制造的机器人专家,材料科学家和研究人员。”
该论文由Wyss研究所的Daniel Fitzgerald和康奈尔大学的Bobak Mosadegh共同撰写。该研究得到了美国国家科学基金会,哈佛大学材料研究科学与工程中心以及怀斯研究所的支持。
出版物:Michael Wehner等人,“一种用于完全软性,自主机器人的集成设计和制造策略,” Nature 536,451–455(2016年8月25日)doi:10.1038 / nature19100
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读


猜你喜欢
-
工程师正在开发机器人航天器以协助在轨卫星维修
2021-11-24 -
新多孔水凝胶可以改善干细胞组织再生的成功
2021-11-02 -
工程师开发可在微重力下跳来跳去的“刺猬”机器人
2021-11-02 -
哈佛工程师打造3D打印自主机器人
2021-11-01 -
“风机器人” –行星天空的未来探索者?
2021-10-27 -
工程师设计可打印的厘米级折纸机器人
2021-10-25 -
工程师开发微调触手,所以微小的机器人可以处理精致的物体
2021-10-20 -
工程师开发微调触手,所以微小的机器人可以处理精致的物体
2021-10-20 -
工程师开发微调触手,所以微小的机器人可以处理精致的物体
2021-10-20 -
新算法可让机器人自主计划任务
2021-10-17 -
麻省理工学院工程师开发用于港口安全的水下机器人
2021-10-07 -
Wyss Institute继续发展其软露天度
2021-10-05 -
无法被电动机器人猎豹在草丛中跑步
2021-10-04 -
可打印的机器人在加热时自组装
2021-09-22 -
电子形状 - 圆形比标准模型预测
2021-09-17