为灵活的医疗机器人开发出低成本,高精度GPS的系统
然后,研究人员使用现有的磁铁本地化方法,它非常像GPS,开发一种预测机器人位置的计算机模型。GPS卫星Ping智能手机并基于信号到达需要多长时间,智能手机中的GPS接收器可以确定手机的位置。同样,研究人员知道磁场应该在机器人中嵌入磁铁周围的强度。它们依赖于四个传感器,这些传感器在机器人操作以测量磁场强度的情况下仔细间隔开。基于领域的强度,它们能够确定机器人的尖端是。
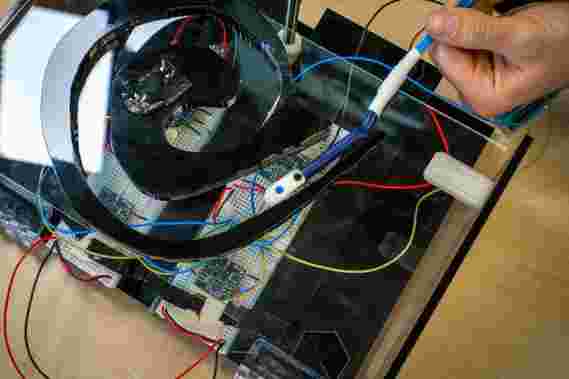
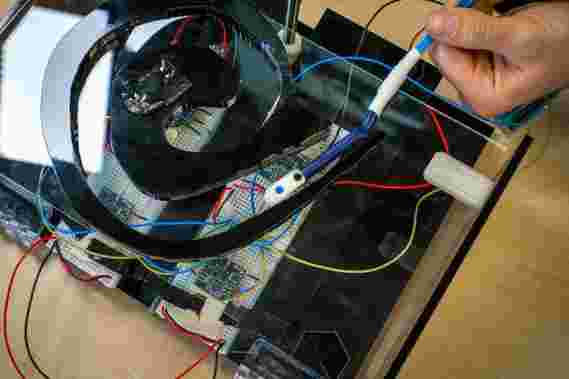
加州大学圣地亚哥机器人制造了实惠,易于使用的系统,以跟踪人体内部柔性外科机器人的位置。系统执行以及现有技术的当前状态,但是昂贵。许多目前的方法还需要接触辐射,而该系统则不存在。
该系统是由UC San Diego的Jacobs工程学院机械工程教授Tania Morimoto开发的,机械工程博士。学生康宁沃森。他们的调查结果在4月2020年4月发布了IEEE机器人和自动化字母。
“连续体内机器人在体内的高度约束环境中工作得非常好,”莫里多托说。“他们本质上比刚性工具更安全,更符合。但追踪他们的位置和身体内部的形状变得更加困难。因此,如果我们能够更容易地跟踪它们,这将是患者和外科医生的一个很大的好处。“
研究人员嵌入了一个柔性机器人尖端的磁铁,可用于身体内的细腻的地方,例如大脑中的动脉通道。“我们与一个不断增长的机器人合作,这是一个由一个非常薄的尼龙制成的机器人,我们倒置,几乎像袜子,并用液体加压,导致机器人生长,”沃森说。由于机器人通过生长柔软并且移动,因此它对周围环境的影响很小,因此非常适合在医疗环境中使用。
然后,研究人员使用现有的磁铁本地化方法,它非常像GPS,开发一种预测机器人位置的计算机模型。GPS卫星Ping智能手机并基于信号到达需要多长时间,智能手机中的GPS接收器可以确定手机的位置。同样,研究人员知道磁场应该在机器人中嵌入磁铁周围的强度。它们依赖于四个传感器,这些传感器在机器人操作以测量磁场强度的情况下仔细间隔开。基于领域的强度,它们能够确定机器人的尖端是。
整个系统,包括机器人,磁铁和磁铁定位设置,费用约为100美元。
Morimoto和Watson进一步走了一步。然后,他们培训了一个神经网络来学习传感器正在阅读的差异以及模型表示传感器应该是阅读的。结果,它们改善了定位准确性以跟踪机器人的尖端。
“理想情况下,我们希望我们的本地化工具可以帮助提高这些种植的机器人技术。我们希望将这项研究推向前进,以便我们可以在临床环境中测试我们的系统,最终将其转化为临床用途,“莫里多托说。
参考:Connor Watson and Tania Morimoto,2020年2月10日,IEEE机器人和自动化字母,“医学应用中的永久磁铁基于机器人的定位”.DOI:
10.1109 / LRA.2020.2972890
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读




猜你喜欢
-
旨在征服月球和行星探索的巧妙新型机器人漫游者
2022-04-17 -
机器人和自动化真的替换有多少份工作?
2022-04-16 -
麻省理工学院开发的传感器织入织物中,因此衬衫可以监测生命体征
2022-04-14 -
物理学家创造了有史以来最敏感的应变传感器
2022-04-14 -
一个国际科学家团队发现了隐藏在磁铁矿中的奇异量子性质
2022-04-14 -
灵感来自猎豹生物力学,研究人员建立世界纪录的快速软机器
2022-04-14 -
机器人帮助一些公司蓬勃发展,而各行各业的工人却在挣扎
2022-04-14 -
提取的新技术,净化关键稀土金属A'游戏换句者'
2022-04-13 -
初创公司部署具有“对话式记忆”功能的AI聊天机器人以进行更多的自然交易
2022-04-13 -
发现新的“旋转”物质发现:自诱导旋转玻璃
2022-04-13 -
新型生物电子化学传感器使用蛋白质纳米线实现卓越的灵敏度
2022-04-12 -
行星勘探流动站具有复杂的机器技术,以避免陷阱
2022-04-11 -
有时乐高玩具是一种玩具–在欧洲核子研究组织(CERN),乐高帮助研究宇宙的构成要素
2022-04-10 -
涵盖军队科学家创建的整个射频频谱的量子传感器
2022-04-09 -
麻省理工学院发明了一个微小的新传感器,以帮助防止食物浪费
2022-04-08