优化的设计和控制机器人,具有弹力,柔性的体
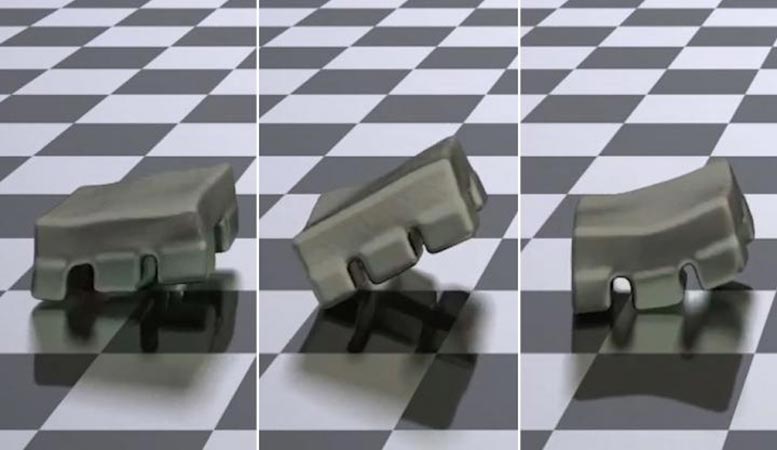
用于针对目标任务的软机器人的控制和设计有效,同时进行了麻烦,并同时优化了对目标任务的控制和设计,传统上是计算中的巨大事业。例如,该模型比在模拟Quadrupedal机器人(图为)应该移动以达到目标目的地时比最先进的方法更快更准确。
麻省理工学院研究人员发明了一种方法可以有效地优化目标任务的软机器的控制和设计,传统上是在计算中的巨大事业。
软机器人有弹性,灵活,壮丽的体,可以在任何特定时刻在基本上移动无限数量的方式。计算地,这表示一个高度复杂的“状态表示”,其描述了机器人的每个部分是如何移动的。软机器人的状态表示可能具有数百万个维度,使得难以计算出机器人完成复杂任务的最佳方式。
在下个月的神经信息处理系统会议上,麻省理工学院研究人员将基于机器人及其环境的底层物理学,其中包括学习紧凑或“低维”但是详细的国家表示的模型,其中包括其他因素。这有助于模型协同优化移动控制和符合特定任务的材料设计参数。
“软机器人是无限的虚拟生物,在任何特定时刻,在任何特定时刻弯曲了十亿种不同的方式,”计算机科学和人工智能实验室(CSAIL)的研究生第一个Andrew Spielberg说。“但是,在真理中,有自然的方式柔软的方法可能会弯曲。我们发现在低维描述中可以非常紧凑地描述软机器人的自然状态。我们通过学习可能的状态的良好描述来优化软机器人的控制和设计。“
在仿真中,型号使能2D和3D软机器来完成任务 - 例如移动某些距离或达到目标点 - 比当前最先进的方法更快,准确地达到目标点。研究人员下次计划在真正的软机器人中实施模型。
加入斯皮尔伯格论文是CSAIL研究生Allan Zao,Tao du,袁明虎; Daniela Rus是CSAIL和Andrew和Erna Viterbi电气工程和计算机科学教授;和Wojciech Matusik,电气工程和计算机科学和计算机科学主教教授和计算制造群体负责人。
“学习 - 循环”
软机器人是一个相对较新的研究领域,但它拥有先进机器人的承诺。例如,柔性体可以提供与人类更安全的互动,更好的物体操纵以及更多的机动性,以及其他益处。
仿真中的机器人控制依赖于“观察者”的一个程序,该程序计算了软机器如何移动以完成任务的变量。在以前的工作中,研究人员将软机器人分解成手工设计的模拟颗粒簇。粒子包含重要信息,有助于缩小机器人可能的运动。例如,如果机器人尝试弯曲某种方式,则致动器可以抵抗足够忽略它的移动。但是,对于这种复杂的机器人来说,手动选择在模拟期间跟踪的群集可能是棘手的。
研究人员摘掉该工作,设计了一个“循环优化”方法,其中在许多模拟中的单个反馈循环期间了解到所有优化参数。并且,与学习优化的同时 - 或“在循环中” - 该方法也会学习状态表示。
该模型采用一种称为材料点法(MPM)的技术,其模拟连续材料粒子的行为,例如泡沫和液体,由背景网格包围。在这样做时,它捕获机器人的粒子及其可观察环境,以像素或3D像素,称为体素,而不需要任何额外的计算。
在学习阶段,将该原始粒子网格信息馈入学习的机器学习组件,该组件学习将图像压缩到低维表示,并将表示的解压缩回输入图像。如果此“AutoEncoder”在压缩输入图像时保留足够的细节,则可以精确地重新创建输入图像从压缩。
在研究人员的工作中,AutoEncoder的学习压缩表示作为机器人的低维状态表示。在优化阶段,该压缩表示回到控制器中,该控制器输出用于机器人的每个粒子应该如何在下一个MPM模拟步骤中移动的计算致动。
同时,控制器使用该信息来调整每个颗粒的最佳刚度,以实现其期望的运动。在未来,该材料信息对于3D打印软机器有用,其中每个粒子点可以用略微不同的刚度印刷。“这允许创建迎合与特定任务相关的机器人运动的机器人设计,”Spielberg说。“通过将这些参数一起学习在一起,您可以将所有内容保持在尽可能多的同步,以使设计过程更容易。”
更快的优化
反过来,所有优化信息又反馈到循环的开始以培训AutoEncoder。在许多模拟中,控制器学习最佳运动和材料设计,而AutoEncoder学习越来越详细的状态表示。“关键是我们希望低维的状态非常描述,”Spielberg说。
在机器人通过集合时间段到达其模拟的最终状态之后 - 例如尽可能接近目标目的地 - 它更新“丢失函数”。这是机器学习的关键组成部分,这试图最小化一些错误。在这种情况下,它最小化,例如,机器人从目标停止的距离。该损失函数流回控制器,该控制器使用错误信号来调整所有优化的参数,以最好地完成任务。
如果研究人员试图直接将模拟的所有原始粒子饲养到控制器中,没有压缩步骤,“运行和优化时间会爆炸,”Spielberg说。使用压缩表示,研究人员能够将每个优化迭代的运行时间从几分钟降至约10秒减少。
研究人员验证了他们的模拟各种2D和3D Biped和四叉机器人的模型。研究人员还发现,虽然使用传统方法的机器人可以高达30,000次模拟来优化这些参数,但在其模型上培训的机器人只花了大约400个模拟。
将模型部署到真正的软机器人意味着解决具有现实世界噪声和不确定性的问题,可能会降低模型的效率和准确性。但是,在未来,研究人员希望为软机器人仿真设计一个完整的管道,从模拟到制造。
###
参考:“学习 - 循环优化:柔软机器人的端到端控制和共同设计通过学习深层潜在的代表“由Andrew Spielberg,Allan Zhao,Tao du,袁明明胡,Daniela Rus和Wojciech Matusik。(PDF)
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读

猜你喜欢
-
物理学家可能刚刚解决了行星如何形成的基本神秘面纱
2022-03-14 -
骨骼结构发现激发更耐用,轻巧的飞机翅膀
2022-03-14 -
纳米级量子传感器在高压下的图像应力和磁性
2022-03-14 -
研究人员发现大自然的备份计划,用于将氮气转化为植物营养素
2022-03-14 -
新技术鉴定了对某些过敏或感染引起的T细胞
2022-03-13 -
“机器人酒店”发射到SpaceX Falcon 9 Rocket的国际空间站
2022-03-13 -
革命性的光学镊子操纵原子,分子和活细胞,如“拖拉机梁”
2022-03-13 -
更有效地将脂肪和污水转化为天然气
2022-03-13 -
人们在大脑上进行性撒谎 - 这项研究揭示了多少
2022-03-12 -
新型光子pH传感器可追踪实验室生长的组织-帮助推进四肢和器官的生长
2022-03-12 -
新的3D打印机产生复杂的玻璃对象[视频]
2022-03-12 -
垃圾谈话伤害性能,即使它来自机器人
2022-03-12 -
矿物质可以保持过去生命的迹象,发现在未来火星着陆点
2022-03-12 -
谷歌,Facebook和Instagram反复更改智能可见度策略与“作弊”之间的边界
2022-03-12 -
研究人员演化了消耗CO2的细菌的能量
2022-03-12


![冲绳发现短尾鱿鱼的新物种[视频]](http://www.eastinstrument.com/uploadfile/2021/0601/202171368.jpg)