人工智能可以实时地看到角落
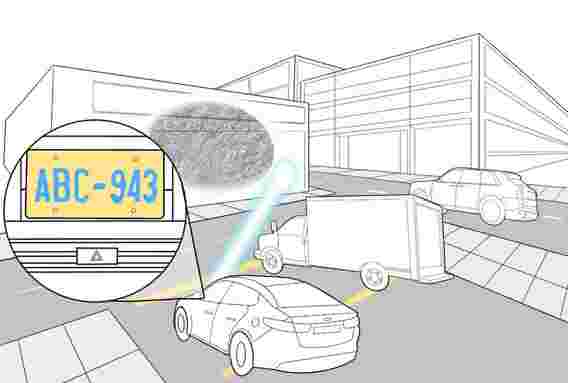
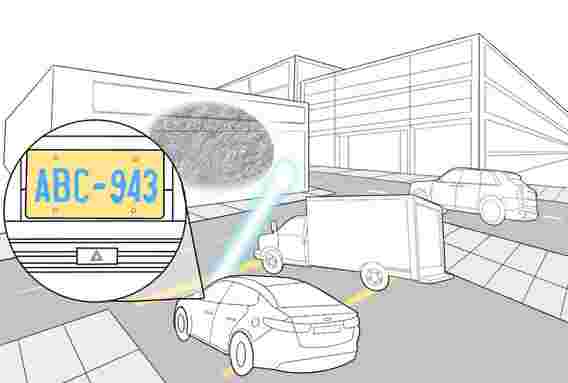
研究人员使用深度学习,创建一个基于新的激光系统,可以实时在角落周围图像。系统可能有一天,让自动驾驶汽车“看”在停放的汽车周围或忙碌的交叉口,不仅可以看到汽车,还要读取车牌。
研究人员利用了一种人工智能的力量,称为深度学习,创建一种新的基于激光的系统,可以实时地在角落里进行图像。随着进一步的发展,系统可能让自动驾驶汽车“看”停放的汽车或忙碌的交叉口,以查看危险或行人。它也可以安装在卫星和航天器上,以进行任务,例如捕获小行星上的洞内的图像。
“与其他方法相比,我们的非视线成像系统提供了独特的分辨率和成像速度,”斯坦福大学和赖斯大学的研究团队领导A. Metzler表示。“这些属性使得能够否则无法实现的应用程序,例如读取隐藏车的车牌,因为它正在驾驶或读取一个拐角处行走的人佩戴的徽章。”
在Optica,光学学会高影响力研究杂志,普林斯顿大学,南方卫生师大大学和赖斯大学的梅尔兹勒和同事报告说,新系统可以将隐藏物体的海底细节与1米区分开。该系统旨在以非常高的分辨率图像图像,但可以与产生低分辨率室大小重建的其他成像系统组合。
“非瞩目的成像在医学成像,导航,机器人和防御中具有重要应用,”来自普林斯顿大学的菲利克海德共同作者。“我们的工作迈出了迈出了在各种这种应用中使用的步骤。”
深入学习解决光学问题
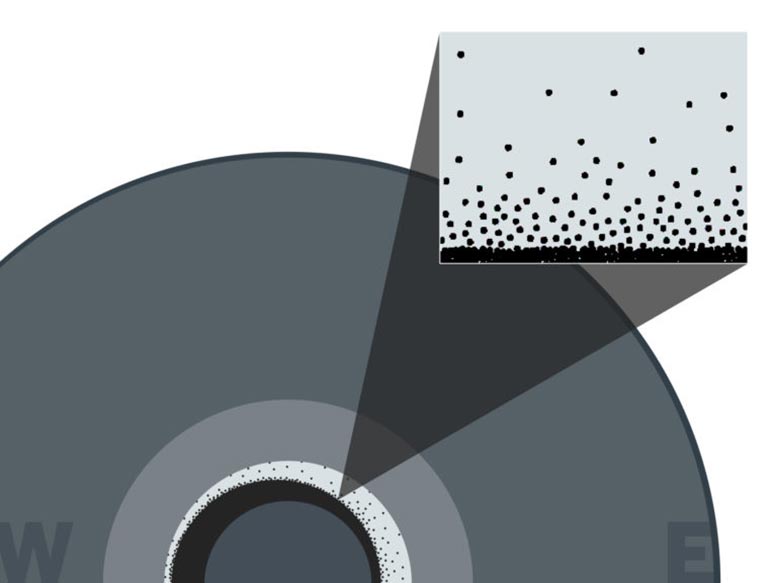
新的成像系统使用市售的相机传感器和功能强大但另外标准的激光源,其类似于激光指针中的液位。激光束将可见墙壁撞击到隐藏物体上,然后返回到墙壁上,创建称为散斑图案的干扰图案,该散斑图案编码隐藏物体的形状。
从散斑模式重建隐藏对象需要解决一个具有挑战性的计算问题。实时成像是必需的曝光时间,但为现有算法产生过多的噪音。为了解决这个问题,研究人员转向深入学习。
“与非视线成像的其他方法相比,我们的深度学习算法对噪声更加强大,因此可以在南部卫理学师大学的共同作者普拉兰纳·兰卡··兰卡··兰卡··兰哈拉·兰哈拉·兰哈拉·帕拉哈省的稳健程度较大。”“通过准确地表征噪声,我们能够合成数据以培训算法使用深度学习解决重建问题而无需捕获昂贵的实验培训数据。”
在角落里看到
研究人员通过使用大约1米从墙壁重建1厘米高的字母和隐藏在角落后面的数字的图像来测试新技术。使用曝光长度的四分之一秒,该方法产生具有300微米的分辨率的重建。
该研究是DARPA革命性的革命性的一部分,通过利用活跃的光场(揭示)计划,该计划正在开发各种不同的技术来在角落周围图像图像隐藏的物体。研究人员现在正在努力通过扩展视野来使系统实现更多应用程序,以便它可以重建更大的对象。
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读

猜你喜欢
-
在2019年在365颗卫星图像中展示太阳
2022-03-26 -
根据全球研究,小捕食者最有可能因人工土地使用而丢失
2022-03-26 -
'Cheerios效应'力量第一次直接测量
2022-03-25 -
科学的谜团关于蒸发后20年的冲突调查结果解决了
2022-03-25 -
在一个分裂的第二个,衣服让男人在别人的眼中
2022-03-25 -
小行星碰撞:裂变团簇和大家庭的物理学
2022-03-24 -
协调行为:羽毛鸟聚集在一起,但是它们如何决定去哪里呢?
2022-03-24 -
NASA GISMO用银河系揭示了1000万亿英里长的宇宙“糖果棒”
2022-03-24 -
解决了50年的力学难题:物理学家证明2D和3D液体在根本上是不同的
2022-03-24 -
遗忘生物学:记忆召回可能依赖于一天中的时间
2022-03-24 -
机器学习包经济校验:eBay在国际商务方面的急剧增加
2022-03-23 -
BBQ打火机转换成高科技实验室设备
2022-03-23 -
新的幽灵成像纳米镜接种捕获活细胞中发生的过程的细节
2022-03-23 -
美国陆军2019年十大科技进步[视频]
2022-03-22 -
结合量子物理学和生物学来改善酶活性的测量
2022-03-22