工程师使用Morph系统开发多功能柔性机器人
机器人正在设想一个柔软的动物启发机器人可以安全地部署在难以接近的环境中的未来,例如在人体的精致外科手术中。
虽然已经创建了厘米大小的软机器人,但到目前为止还没有获得可以在较小尺寸的尺寸下移动和操作的多功能,柔性机器人。
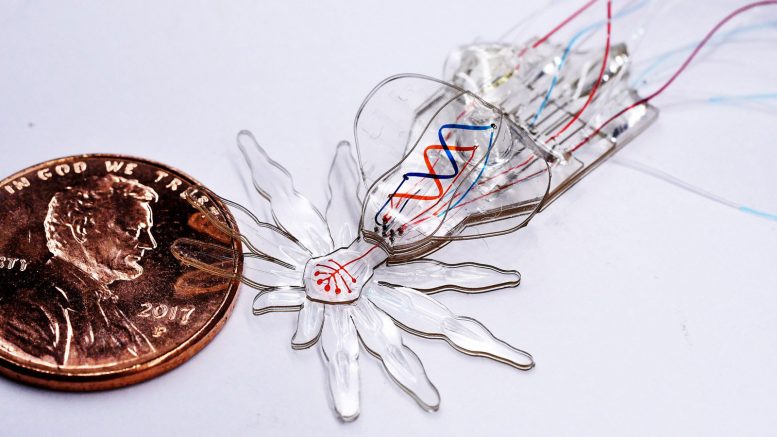
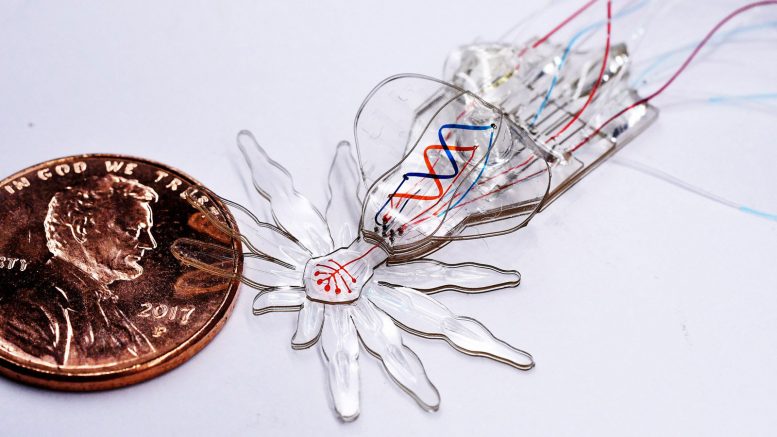
哈佛大学的生物学启发工程研究所的一支研究人员,哈佛约翰A.保尔森工程和应用科学学院和波士顿大学现在通过开发综合制造过程来克服这一挑战,这使得软机器设计毫米秤具有千分尺寸的特点。为了展示其新技术的能力,他们创建了由毫米大小的五颜六色的澳大利亚孔雀蜘蛛的机器人软蜘蛛 - 从单一的弹性材料,具有身体整形,运动和颜色特征。该研究发表于先进材料。
有什么能够移动和展示其颜色,仅由硅橡胶制成,并在毫米刻度制造?软机器人孔雀蜘蛛。研究人员组合了三种不同的制造技术,以创造一种新型折纸启发的软材料微制造过程,超出现有方法在这种小规模上实现的方法。
“最小的软机器人系统仍然非常简单,通常只有一种自由度,这意味着它们只能致力于造成一个特定的变化或运动类型,”研究的研究共同作者。“通过开发一种合并三种不同制造技术的新混合技术,我们创建了一种柔软的机器人蜘蛛,只有18自由的硅橡胶制成,包括结构,运动和颜色的变化,以及微米范围内的微小功能。 “
Russo帮助将该项目发起作为罗伯特伍德队的博士后研究员在Wyss Institute和Seas,现在是波士顿大学的助理教授。
“在软机器人的领域中,这种新的制造方法可以铺平道路,以实现这种小规模的类似水平的复杂性和功能,因为他们的刚性对应物展出的那些,”核心教师和联合领袖Wyss Institute的BioinSpired软机器人平台和海洋工程和应用科学教授。“在未来,它还可以帮助我们在小型动物中效仿和理解结构功能关系,比刚性机器人能够更好,”他补充说。
在它们的变形概念 - 用于可重新配置气动/水解装置的微流体折纸的速记 - 团队首先使用软光刻技术来产生12层的弹性硅氧烷,构成软蜘蛛的物质。每层用激光微机械技术精确地切出模具,然后粘合到下面的一个,以产生软蜘蛛的粗糙3-D结构。
“这首第一变形系统是在单一的单片过程中制造的,可以在几天内进行,并且在设计优化努力中易于迭代,”第一个和相应的作者Tommaso Ranzani说,他在木材集团的博士后研究员开始研究也是波士顿大学的助理教授。
“Morph方法可以向更专注于这些机器人的尺寸和灵活性的研究人员开辟了软机器人领域,这些机器人的尺寸和灵活性可以为内窥镜检查和显微外科提供完全新的方法,”Wyss Institute Directe Donald Ingber表示也是HMS和波士顿儿童医院血管生物学血管生物学教授的犹大民俗学教授,以及海洋生物工程教授。
研究中的其他作者是尼古拉斯巴特利特,伍德拉斯队的研究生,以及一位前博士博士,迈克尔韦纳,博士博士博士,他们知道是加利福尼亚大学圣克鲁斯大学助理教授。
要阅读完整的文章,请访问Wyss Institute网站。
该研究由哈佛大学的Wyss学院资助,国防高级研究项目机构(DARPA)和国防科学和工程研究生奖学金。
出版物:Tommaso Ranzani等,“通过注射诱导的自折叠”提高软微观结构的维度,“2018年先进的材料; DOI:10.1002 / ADMA.201802739
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读
猜你喜欢
-
美国国家航空航天局的火星侦察轨道运动员观看火星的“蜘蛛”
2022-02-04 -
工程师开发了可以携带自己电源的软机器人
2022-02-02 -
麻省理工学院的工程师开发了可以飞行和航行的自主滑翔机
2022-01-31 -
生物学家揭示蜘蛛丝形成背后的关键机制
2022-01-31 -
新的研究表明世界上最有毒的蜘蛛是堂兄弟
2022-01-30 -
Origami-Inspired Robot打开了用于显微外科,微型装配的新途径
2022-01-27 -
这个四毫米长的Millirobot可以在困难的地形上行走,爬行和翻滚
2022-01-25 -
新的研究表明,害怕蜘蛛和蛇深深地嵌入了人类
2022-01-22 -
孔雀蜘蛛激发了新的光学技术
2022-01-20 -
月球上的光看起来有什么不同,美国宇航局正在做什么
2022-01-12 -
新的廉价机器人从管道内发现泄漏
2022-01-12 -
工程师设计微流体装置,产生被动液压动力
2021-12-15 -
麻省理工学院工程师设计透明,基于凝胶的机器人
2021-12-04 -
SEAS工程师3D打印第一个自主的完全软的机器人
2021-11-25 -
工程师正在开发机器人航天器以协助在轨卫星维修
2021-11-24