这个四毫米长的Millirobot可以在困难的地形上行走,爬行和翻滚

现在,由Max Planck研究人员在斯图加特引入的millirobot在陆地和水上移动。水母和毛毛虫只是激发科学家们的两个自然榜样。© 智能系统的MPI
小型机器人无需担心将来会遇到障碍物:斯图加特马克斯·普朗克智能系统研究所的科学家开发了一种微型,灵活的机器人,可以掌握各种形式的运动。它的磁力驱动器使其可以在困难的地形上行走,爬行和滚动。而且,它可以运输少量货物,并可以在液体中和液体中游泳。将来,以这种方式移动的微型机器人可以将药物专门运输到需要的地方。
微型机器人的特点是具有机动性。这种微小的车辆只有一条四毫米长的弹性硅带,可用于多种运动模式,即使在复杂的环境中,millirobot也可以操纵。另一方面,以前的微型机器人只能在有限的范围内机动,并能满足他们的要求,尤其是在困难的地形中。
总部位于斯图加特的马克斯·普朗克智能系统研究所的研究人员从自然界中的可操纵性人才发展中获得了启发:“例如,当我们建造机器人时,我们会研究软体生物的运动机理,并从中汲取灵感。”物理情报部主任梅汀·西提(Metin Sitti)说。“使用我们的millirobot,结果是混合了几种软生物,例如甲虫的幼虫和毛毛虫。但是,精子和水母也可以作为模型。”
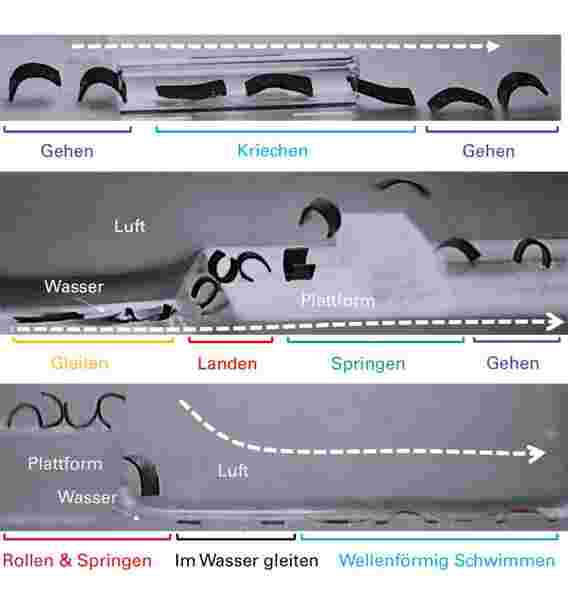
通过轻松的障碍路线:Millirobot可以步行,爬行,游泳,爬上台阶并在复杂的环境中跳跃。© 智能系统的MPI
在假胃和鸡肉组织中进行初始测试
该机器人能够执行不同的动作,因为科学家将磁性微粒嵌入其柔软的弹性硅橡胶主体中,从而产生了精确定义的磁化曲线。这使研究人员可以使用外部磁场对其进行操作和控制。通过改变磁场的强度和方向,它们会以不同的方式使橡胶条变形。这使Millirobot可以完成与人体类似的障碍物路线:它可以在表面上行走或滚动,跳过障碍物,通过狭窄的管道爬行以及在液体中或液体中游泳。此外,它可以抓取物体,运输物体并将它们存放在指定的位置。
磁力驱动器使微型车辆能够行走,爬行,跳跃,游泳甚至运输小物体。
Sitti的团队在合成的外科手术胃模型和鸡肉组织中测试了millirobot,其中人工多才多艺展示了出色的效果。当研究人员无法直接观察时,他们使用超声波成像跟踪机器人前进的位置和方式。在将这种Millirobot用于患者之前,仍然需要克服巨大的挑战:例如,它需要证明它可以在人体内控制。但是,研究人员相信可以克服这些障碍。
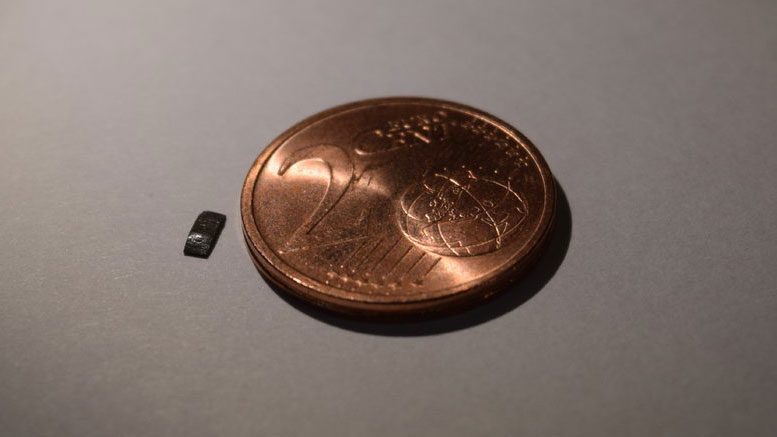
硅橡胶条带有嵌入的磁性颗粒,形成了非常易于操纵的millirobot主体,其长度仅为4毫米。© 智能系统的MPI
millirobot用于运输药物
“我们的目标是我们的Millirobot有一天将药物运送到需要的地方–类似于将包裹运送到前门,” Metin Sitti说。“我们的目标是在吞咽机器人或通过皮肤上的小开口将其插入体内的情况下,对患者进行微创医疗程序中使用。然后,机器人可以从那里穿过消化道或膀胱,或者到达心脏–我们设想了许多可能性。”
对移动微型机器人的研究可能会在未来的医学中应用,它在物理情报部门中发挥着核心作用。Max Planck研究人员的希望是,有一天,无电缆移动机器人将在医学界崭露头角,并开辟目前尚无法实现的新的疾病治疗和手术视角。
借助这样的微型机器人,外科医生将可以直接进入并精确控制今天只能使用手术刀刺入的身体区域。“如果不进行手术,目前无法进入身体的许多区域。我们的目标是使用我们的软Millirobot进行诊断和治疗,以无创方式进入这些区域。” Metin Sitti说。
出版物:胡文奇等,“具有多模式运动的小型软体机器人”,《自然》,2018年; doi:10.1038 / nature25443
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。


猜你喜欢
-
工程师开发自动化过程,用于发现超材料的最佳结构
2022-01-24 -
最新研究表明,月亮的水可能被广泛传播并且无法移动
2022-01-24 -
潮汐循环可以提供火山爆发的先进警告
2022-01-24 -
藻类动力燃料电池移动更靠近现实的步骤
2022-01-24 -
量子化学解决了氨基酸的奥秘
2022-01-24 -
新研究表明,对ZIKA的免疫反应危害胎儿发育
2022-01-23 -
新的研究揭示了复活节岛有一个合作社区
2022-01-23 -
与非洲裔美国人的Sema3a基因变种有关的抑郁和酗酒
2022-01-23 -
玉米淀粉和水的惊人特性
2022-01-22 -
研究人员使用CrispRup携带的纳米粒子来编辑基因组
2022-01-22 -
生物工程师使用红外成像来优化MOF的结构
2022-01-22 -
研究人员阐明了风险偏好的性质
2022-01-22 -
研究人员迄今为止发现最古老的图像
2022-01-21 -
研究人员使用下一代视神经理来控制单一神经元
2022-01-20 -
新的耶鲁学习揭示了ADHD作为不同疾病的集合
2022-01-19