灵感来自猎豹生物力学,研究人员建立世界纪录的快速软机器
研究人员启发了猎豹生物力学,研究人员已经开发出一种新型的软机器人,能够在固体表面或水中移动比前几代软机器人更快。
研究人员启发了猎豹生物力学,研究人员已经开发出一种新型的软机器人,能够在固体表面或水中移动比前几代软机器人更快。新型软机器人也能够精致地抓住物体 - 或具有足够的力量来提升重物。
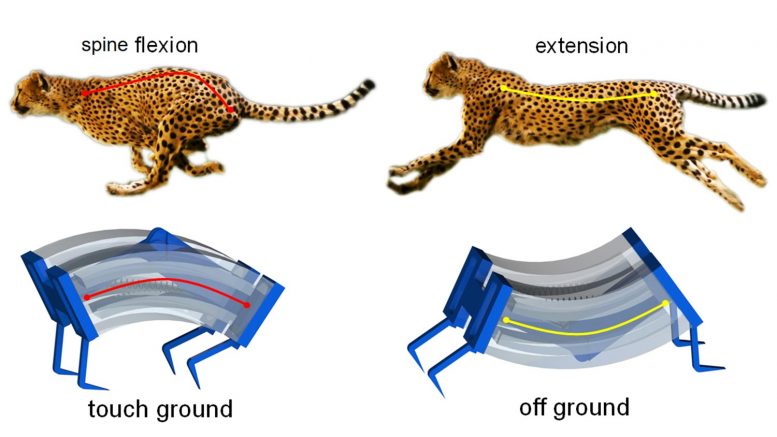
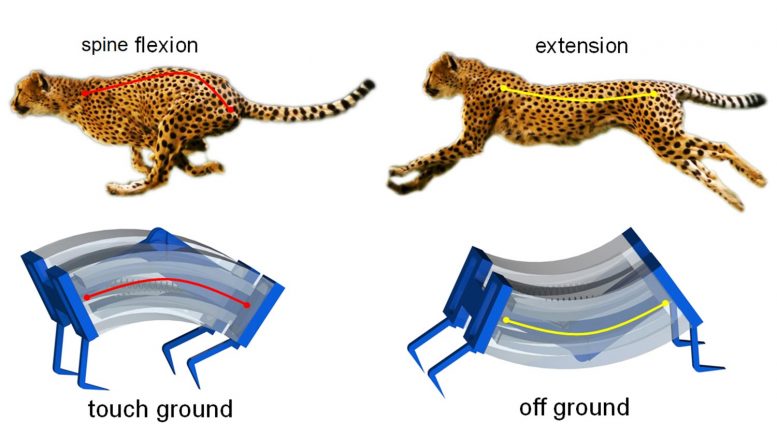
“猎豹是土地上最快的生物,他们从他们的刺弯曲产生了速度和力量,”北卡罗来纳州立大学机械和航空航天工程助理教授杰寅说,新的纸张软机器人。
“我们受到了猎豹的启发,可以创建一种具有弹簧动力的软机器人的软机器,这一类型的”双稳态“脊椎,这意味着机器人有两个稳定状态,”尹说。“我们可以通过将空气泵入柔软的硅胶机器人的通道,快速切换这些稳定状态。两种状态之间的切换释放大量能量,使机器人能够快速施加抗地面的力。这使得机器人能够围绕地面疾驰,这意味着它的脚离开了地面。
“以前的软机器人是爬行物,始终保持与地面接触。这限制了他们的速度。“
由猎豹的生物力学启发,研究人员开发了一种新型软机器,能够在固体表面或水中更快地移动比前几代软机器。
最快的软机器,直到现在,在平坦的固体表面上每秒高达0.8体长度的速度。新的软机器人称为“利用弹性不稳定性的放大性能”(LEAP),能够达到每秒高达2.7体长度的速度 - 超过三倍 - 以大约3Hz的低致动频率。这些新机器人也能够耗尽陡峭的倾斜,这可能是挑战或不可能对施加较低的力的软机器人。
这些“疾驰”的跳跃机器人长约7厘米,重约45克。
研究人员还证明了飞跃设计可以提高软机器人的游泳速度。连接鳍,而不是脚,一个LEAP机器人能够以每秒0.78体长度的速度游泳,与前一个最快的游泳软机器人每秒0.7体长度。
“我们还证明了使用几个软机器人一起工作,如钳子,抓住物体,”尹说。“通过调整机器人施加的力量,我们能够将物体抬起精致作为鸡蛋,以及重量10公斤或更多的物体。”
研究人员注意到这项工作是概念证明,并且乐观地说,他们可以修改设计,使得甚至更快,更强大的飞跃机器人。
“潜在的应用包括搜索和救援技术,速度是必不可少的,而工业制造机器人,”尹说。“例如,想象的生产线机器人更快,但仍然能够处理脆弱的物体。
“我们开放与私营部门合作,以微调方式将这种技术纳入其运营。”
###
参考:“利用弹性不稳定性进行扩增性能:脊柱启发高速和高力柔软机器人“由yichao唐,yinding chi,jifeng sun,tzu-hao huang,omid h. maghsoudi,安德鲁·斯普等,建国赵,昊苏和杰尹,2020年5月8日Propance.doi:
10.1126 / sciadv.aaz6912.
本文“利用弹性稳定性放大性能(LEAM):脊柱启发的高速和高力软机器,”将于200月8日在杂志上发布。本文的第一个作者是伊希堂,前博士。杰寅的学生,当尹在寺庙大学的教师时。本文是由博士,博士学位撰写的。纳邦国家的学生; omid maghsoudi和寺庙的安德鲁斯威斯;孙登孙和江罗科罗拉多州立大学;和纽约城市大学的Tzu-Hao Huang和Hao Su。
这项工作是通过国家科学基金会的支持,根据“授权”2010717和2005374。
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读



猜你喜欢
-
机器人帮助一些公司蓬勃发展,而各行各业的工人却在挣扎
2022-04-14 -
人工智能消耗了惊人的电量– MIT系统降低了碳足迹
2022-04-14 -
450开尔文处的15万亿个原子的量子纠缠具有“令人惊讶的结果”
2022-04-13 -
高速原子视频:以惊人的每秒1600帧的速度捕获单个分子
2022-04-13 -
基于激光的金属3D印刷中的突破会降低缺陷
2022-04-13 -
初创公司部署具有“对话式记忆”功能的AI聊天机器人以进行更多的自然交易
2022-04-13 -
多功能智能电子眼镜监控健康,保护眼睛,控制视频游戏
2022-04-12 -
行星勘探流动站具有复杂的机器技术,以避免陷阱
2022-04-11 -
使用纳米结构的类似橡胶的材料创造了新的“人体组织替代物”
2022-04-11 -
耦合量子点可能提供一种存储量子信息的新方法
2022-04-10 -
新的石墨烯 - 碳纳米管催化剂可以点燃清洁能量旋转
2022-04-09 -
高科技隐形眼镜正确的颜色失明
2022-04-08 -
使用黑暗能量调查数据超越海王星的新小星球
2022-04-08 -
干细胞技术通过擦拭他们的DNA清洁来恢复老人细胞
2022-04-08 -
“舞蹈猫热” - 鉴定为米纳塔汞中毒悲剧的新罪魁祸首
2022-04-08





![宇航员如何在空间中升级复杂的实验[视频]](http://www.eastinstrument.com/uploadfile/2021/0601/202180266.jpg)