DARPA地下自主机器人导航挑战

Costar会员和Caltech毕业生Amanda Bouman经营了一个名为SPOP的机器人,由BOSTON动态提供了JPL提供的自主“SMARTS”。
机器人是否正在探索地球上的其他行星或灾区的洞穴,自主权使他们能够在没有人类指导或访问GPS的情况下导航极端环境。
地下挑战或子技术正在测试这种尖端技术。由国防高级研究项目代理(DARPA)赞助,比赛在2020年2月27日星期三结束了其第二次电路。在比赛中首先在竞争中,由NASA的喷射推进实验室领导的12个机器人,60人团队(也有申报者为单独的虚拟竞争)。
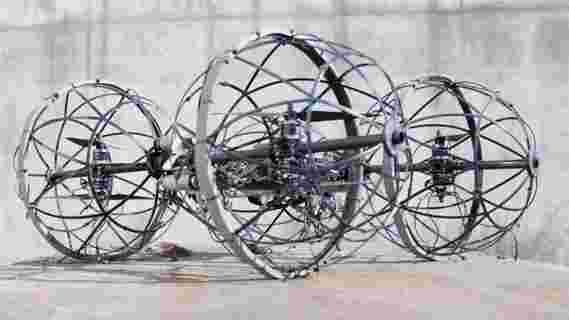
Team Costar带来了一个滚动/飞行机器人,称为DrivoCopter到2020年的Darpa地下挑战城市巡回赛。
三年超过四个电路的子技术。与每个人一起,团队编程他们的机器人浏览一个复杂的地下课程。去年8月举行的第一场比赛发生在矿井。对于最近的,称为城市巡回赛道,团队在华盛顿州埃尔马的未完成的发电厂中互相赛跑。
每个团队的机器人都搜索了一组20个预定对象,为每个查找的一个点验证。对于城市巡回赛,斯科尔赢得了16分; 2号球队,拥有11分,是探险家,由卡内基梅隆大学领导。
协作地下的自治机器人(Costar)正在开发能够自主探索洞穴,坑,隧道和其他地下地形的机器人。观看团队和他们的机器人队伍准备在赛马州埃尔马州埃尔马州Elma高中的练习期间为城市巡回赛,在竞争中的努力。
“目标是为我们的机器人开发软件,让他们决定如何在面临新的惊喜时进行,”斯科尔的团队领导阿格拉的JPL说。“这些机器人是高度自主,而且大多数情况都在没有人为干预的决定。”
Costar代表合作地下自治机器人,带来了可以滚动,步行或飞行的机器,具体取决于他们遇到的东西。沿途,机器人必须映射环境,并找到像温暖的人体模型,这些物体是模拟灾难幸存者或带有Wi-Fi信号的丢失的手机。旨在模拟城市环境的这种课程,还包括二氧化碳泄漏和暖风通风口。

Team Costar将这个机器人称为哈士奇UGV,到2020年DARPA地下挑战城市巡回赛。
加入城市巡回赛的团队是一个名为SPOT的四足球机,由波士顿动态提供。
“我们不得不跑步的两种课程之一有多个层面,因此波士顿动力学机器人在楼梯上很棒,”乔尔布里克,一位加州教授和杰普研究科学家。他是COSTAR团队的CALTECH校园部分的领导者。
当机器人探索时,他们向一个人类主管送回视频和数字地图,他们仍然在无线电接触中,与前100英尺(30米)左右的课程。它们可以通过丢弃通信节点,一种无线转发器来扩展该范围。
一旦出于联系,每个机器人都可以决定是否继续或回溯以便更新团队。每个人也必须依靠机器人访问课程的不同级别。例如,轮式机器人可能要求四足动物爬上或下降一段楼梯。
Team Costar对他们首先放置在2020年的DARPA地下挑战城市赛道的消息中作出反应。
“这些课程非常非常挑战,而且大多数困难都在于在他们超出范围后与机器人沟通,”Agha说。“这对NASA至关重要:我们希望将机器人送入月球或火星上的洞穴,他们必须自己探索。“
在月亮或火星上映射洞穴可以识别未来宇航员的好庇护所。此外,如果它有的话,微生物生命在火星表面或行星卫星的冰冷海洋内有更好的生存机会,如Europa,Enceladus和泰坦。美国国家航空航天局希望在这些地区寻找生活,机器人经常不合时宜。
该八月未公开的自然洞穴网络将在下船挑战中进行下一循环。最终电路将在2021年8月举行混合隧道,城市环境和天然洞穴。竞争中的团队竞争,最终事件有机会赢得DARPA的高达200万美元的资金。
Costar,包括JPL; CALTECH,管理NASA的JPL;麻省理工学院;卡斯特(韩国先进科技学院);瑞典的露天理工大学;和行业合作伙伴。
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读





猜你喜欢
-
显示机器人如何完成家务 - 自动化机器人只是通过观看学习
2022-03-27 -
蜘蛛侠式机械抓取器抵抗重力-秘密在于高速旋转水环
2022-03-24 -
美国陆军2019年十大科技进步[视频]
2022-03-22 -
革命性的“机器人铁匠”技术可以恢复美国制造业
2022-03-20 -
超轻型机器人昆虫使用柔软的人造肌肉来移动-幸存者被苍蝇拍夷为平地
2022-03-19 -
照明驱动蝙蝠出洞穴,无论光的颜色
2022-03-19 -
具有演绎推理的AI机器人可以在多人隐藏角色游戏中击败人类
2022-03-18 -
智能卫星在太空中修理和加油搁浅的卫星
2022-03-18 -
基于变形材料的微型机器人自主导航
2022-03-18 -
Pavlov软机器人:液晶聚合物学会移动和抓住物体
2022-03-16 -
双腿机器人在运行和跳跃时模仿人性平衡[视频]
2022-03-16 -
优化的设计和控制机器人,具有弹力,柔性的体
2022-03-14 -
“机器人酒店”发射到SpaceX Falcon 9 Rocket的国际空间站
2022-03-13 -
垃圾谈话伤害性能,即使它来自机器人
2022-03-12 -
两腿机器人模仿力反馈外骨骼套装中的人类操作员[视频]
2022-03-12