机器学习算法为可穿戴外刀的个性化控制策略
当涉及软辅助设备时 - 就像哈佛生物赛期实验室创造的可穿戴外侧 - 佩戴者和机器人需要同步。但是每个人都会以不同的方式移动,并将机器人的参数定制到识别用户是耗时和低效的过程。
现在,来自Harvard John A.Paulson工程和应用和科学学院的研究人员以及哈佛大学的Wyss生物学启发工程学院开发了一种有效的机器学习算法,可以快速实现这一工作。该研究描述于科学机器人中。
“这种新方法是优化辅助可穿戴设备的控制参数设置的有效和快速的方法,”海洋海洋博士道,博士生博士生,研究。“使用这种方法,我们实现了髋部延伸辅助装置的佩戴者代谢性能的巨大改进。”
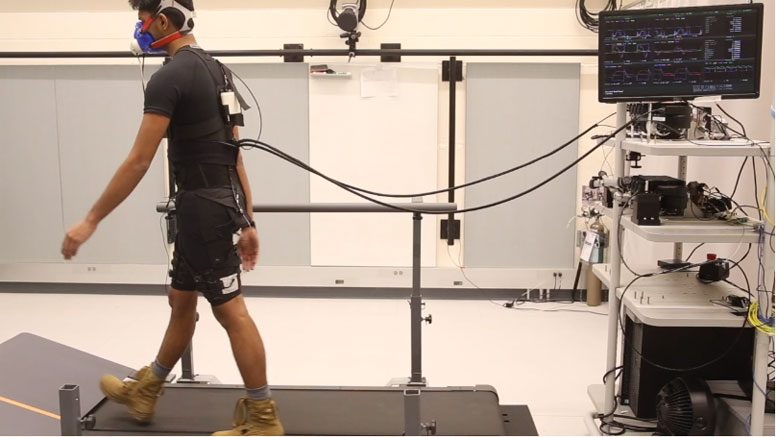
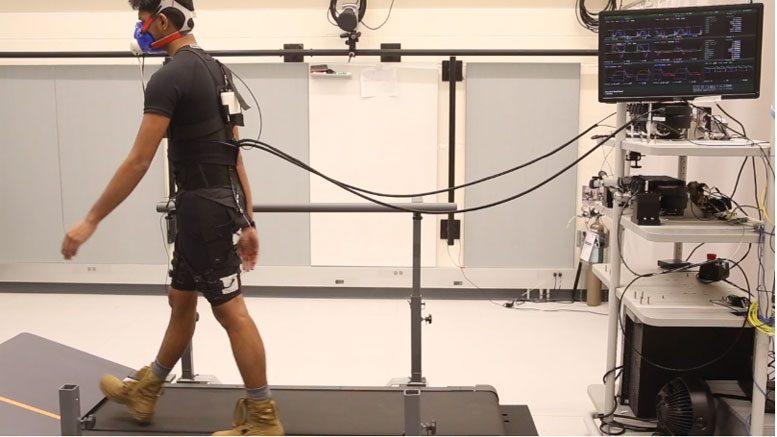
来自Harvard John A. Paulson工程和应用和科学学院的研究人员和Wyss的生物启发工程研究所已经开发出一个有效的机器学习算法,可以快速定制个性化的控制策略,适用于柔软,可穿戴的外侧。
人类在走路时不断调整他们的动作以节省能源。研究人员称之为代谢成本。
“之前,如果您有三个不同的用户与辅助设备一起行走,您需要三个不同的援助策略,”海洋和其他联合第一作者的博士后研究员。“找到每个佩戴者的正确控制参数,曾经是难以逐步的过程。”
由Conor Walsh领导的研究人员开发的新算法,John L. Loeb副教授工程和应用科学教授,海域助理和计算机科学助理教授助理和计算机科学助理教授,通过这种可变性来迅速识别最佳控制参数尽量减少走路的工作。
研究人员应用了所谓的人类循环优化,它使用人类生理信号的实时测量,例如呼吸速率,以调整装置的控制参数。随着算法在最佳参数中磨练,它告诉外部何时以及在哪里提供辅助力量以改善髋关节延期。贝叶斯优化方法使用的团队首次在普罗诗中的纸张中报道。
算法的组合和适应在没有设备的步行方面的步行相比减少了17.4%的代谢成本,超过了球队以前的工作超过60%以上。
“优化和学习算法将对未来的可穿戴机器人设备产生重大影响,该设备设计用于协助一系列行为,”Kuindersma说。“这些结果表明,优化甚至非常简单的控制器可以在步行时对用户提供重要的,缺乏效益。扩展这些想法,以考虑更具表现力的控制策略和具有佩戴需求和能力的人将是一个令人兴奋的下一步。“
“穿着可穿戴机器人,如软泄漏,这对正确的时间来说至关重要,以便他们可以用佩戴者协同工作,”沃尔什说。“通过这些在线优化算法,系统可以学习如何在大约20分钟内自动实现这一目标,从而最大限度地提高到佩戴者的利益。”
该团队的下一步是将优化应用于更复杂的设备,同时协助多个关节,例如HIP和脚踝。
“在本文中,我们通过优化髋部延伸,展示了代谢成本的高度降低,”丁说。“这是为了展示你能做什么伟大的大脑和伟大的硬件。”
出版物:Ye Ding,等,“在步行期间用软外来圈的臀部辅助的”人类在一起,“科学机器人,2018年2月28日:卷。 3,问题15,eaar5438; DOI:10.1126 / scirrobotics.aar5438.
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。


猜你喜欢
-
新的麻省理工学院设备可以从沙漠空气中收获水
2022-01-25 -
新的模拟提供了超级分类黑洞合并的最初提示
2022-01-25 -
这个四毫米长的Millirobot可以在困难的地形上行走,爬行和翻滚
2022-01-25 -
工程师开发自动化过程,用于发现超材料的最佳结构
2022-01-24 -
最新研究表明,月亮的水可能被广泛传播并且无法移动
2022-01-24 -
潮汐循环可以提供火山爆发的先进警告
2022-01-24 -
藻类动力燃料电池移动更靠近现实的步骤
2022-01-24 -
量子化学解决了氨基酸的奥秘
2022-01-24 -
游戏更换者:大规模网络Markov聚类算法的实现
2022-01-23 -
新研究表明,对ZIKA的免疫反应危害胎儿发育
2022-01-23 -
新的研究揭示了复活节岛有一个合作社区
2022-01-23 -
与非洲裔美国人的Sema3a基因变种有关的抑郁和酗酒
2022-01-23 -
玉米淀粉和水的惊人特性
2022-01-22 -
研究人员使用CrispRup携带的纳米粒子来编辑基因组
2022-01-22 -
生物工程师使用红外成像来优化MOF的结构
2022-01-22