好奇程度流动站首次使用自主导航

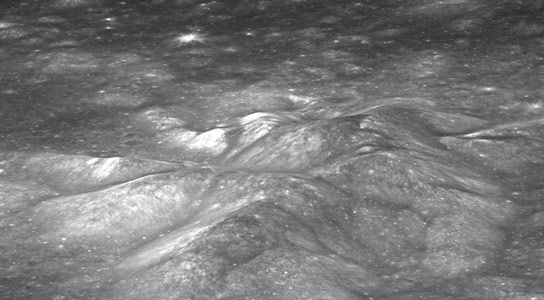
来自导航摄像机(NavCam)的这种图像的Mosaic在美国宇航局的火星流浪者的情况下显示了在第376届火车日,或2013年8月27日)的第376号火星日或溶胶的位置。在好奇心完成后,图像是正确的,在此期间它在未知地面上使用自主导航。
NASA本周第一次成功使用自主导航。
加州帕萨迪纳 - 美国宇航局的火星流浪者好奇心首次使用了自主导航,这是让流浪者为自己决定如何安全地驾驶火星的能力。
这个最新的好奇心的能力阵列将有助于流动站覆盖剩余的地面途中以尖锐的途径,地质层持有有关古火星对环境变化的信息。该能力使用了从美国国家航空航天局的火星勘探机会使用的类似能力的工程师改进的软件,这些能力也是在火星上活跃的类似能力。
使用自主导航或Autonav,好奇心可以分析在驱动器期间需要的图像来计算安全驾驶路径。这使它能够安全地进行,即使在地球上的人力流动站司机可以提前评估的区域也可以安全地进行。
8月27日星期二,好奇心成功地使用自主导航来驱动到地面,在驱动器开始之前无法确认安全。这是一个好奇心的首先。在上周的预备测试中,好奇心绘制了一个驱动器的一部分,但在运营商提前确定为安全的一个区域内。
“好奇心需要几套立体声对图像,以及罗夫的计算机流程来映射任何几何危险或粗糙地形,”NASA的喷气机推进实验室,加利福尼亚州帕萨迪纳的牵头飞机工程师和流动站司机。“的ROVER考虑它可以采取的所有路径来获取驱动器的指定端点并选择最好的路径。“
星期二的驱动器,特派团的第376号火星日或“溶胶”在一个抑郁症中取得了好奇心,地面细节从之前的驱动器结束的位置看不到。该驱动器包括约33英尺(10米)的自主导航,横跨隐藏地面,作为一天的一部分,总驱动为约141英尺(43米)。
“我们可以在倾角前看到该地区,我们告诉流浪者在那里驾驶那部分。我们可以在另一边看到地面,在那里我们指定了漫游者的点来结束驱动器,但是好奇心,为自己驾驶了如何驾驶未明确的部分,“罗孚司机说,一个流浪者的John Wright说。
从“格伦利”区域的多月跋涉到2013年上半年的多月跋涉到了几个月,到了任务主要目的地的入学点:3英里高的下层(5 -kilemeter-tall)土墩称为夏普。
最新的驱动器带来了行驶的距离,因为离开格伦利至0.86英里(1.39公里)。沿着锐利入口点的剩余距离约为4.46英里(7.18公里),沿着“快速交通路线”。根据美国宇航局的火星侦察轨道参数的高分辨率成像科学实验(HIRISE)相机的图像,绘制了该路线。实际的驾驶路线,它将基于来自好奇心自己的相机的图像,可能更长或更短。
好奇心的科学团队已经沿着快速运输途径挑选了几个航线,以便在夏普地安装夏普,驾驶可能会暂停几天科学。在达到这一航点之前的第一个航点之前,流浪者的速度约为0.31英里(500米),从轨道图像出现以提供暴露的基岩检查。
“每个航路点代表了一个好奇心,在漫长的旅程中暂停到夏普和学习当地兴趣的学习特征期间,”加州理工学院帕萨迪纳州帕萨迪纳的好奇心项目科学家约翰格罗茨格洛泽表示。“这些特征是基于自动化图像的地质学兴趣,并且它们非常靠近路径,这些路径为夏普山底座提供最迅速的路径。我们将研究每个溶胶,也许选择一个用于钻探如果看起来足够有趣。“
在2012年8月登陆大峡谷之后,好奇心向东向格伦利地区开车,在那里它完成了特派团的主要科学目标,为古老的潮湿环境寻找有利于微生物生命的条件的证据。流动站的路线现在是西南部的。在夏普,在大峡谷中间,科学家们预计古老火星环境如何变化和发展的证据。
JPL是CALTECH的专区,管理华盛顿州NASA科学任务局的火星科学实验室项目。JPL设计并建造了该项目的“好奇号”流动站。
有关好奇心的更多信息在http://www.jpl.nasa.gov/msl,http://www.nasa.gov/msl和http://mars.jpl.nasa.gov/msl/。您可以在http://www.facebook.com/marscuriosy和http://www.twitter.com/marscuriosy上遵循Facebook上的任务。
图像:NASA / JPL-加州理工学院
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
猜你喜欢
-
摇滚“出现”在机会漫游者的面前
2021-09-14 -
摇滚“出现”在机会漫游者的面前
2021-09-14 -
好奇心未能在火星上检测甲烷
2021-09-13 -
天文学家预计Comet Ison的近距离火星
2021-09-12 -
美国航空航天局的好奇心在火星上找到水分子
2021-09-12 -
美国航空航天局的好奇心在火星上找到水分子
2021-09-12 -
科学家在火星上找到了花岗岩的证据
2021-09-12 -
古代洪水平原Kasei Valles的全新穿越视频
2021-09-12 -
科学家认为火星火山口是一个古老的超级加载遗迹
2021-09-11 -
研究人员发现古老火星地壳样本
2021-09-11 -
云室实验显示了火星云的形式
2021-09-11 -
研究人员设计了一种用于检测火星的生命的DNA测序微芯片
2021-09-10 -
数据表明火星大气中富含氧气
2021-09-10 -
好奇心发现古代史上的证据
2021-09-10 -
数据表示温度上升和每天在火星上均为两次
2021-09-10